องค์ประกอบของระบบควบคุมหุ่นยนต์
ในตอนแรกนี้ผู้เขียนขอทิ้งท้าย ให้ทุกท่านทราบเกี่ยวกับองค์ประกอบของระบบควบคุมหุ่นยนต์กันไว้เพื่อที่จะได้เตรียมความพร้อมในเรื่องต่อไปในตอนหน้า สำหรับองค์ประกอบของระบบในการควบคุมหุ่นยนต์ประกอบด้วย องค์ประกอบหลัก คือ
- Programming Pendent : อุปกรณ์ที่ทำหน้าที่ในการป้อนคำสั่งโดยผู้ควบคุมหรือ User
- Controller : ส่วนที่ทำหน้าที่ในการรับคำสั่งจาก User ผ่าน Programming Pendant และนำมาประมาณผล เพื่อทำการควบคุมหรือสั่งการทำงานของหุ่นยนต์
- Manipulator : เรียกง่ายๆ ว่า ตัวหุ่นยนต์ ที่จะทำงานตามคำสั่งที่ผ่านการประมวลผลจาก Controller
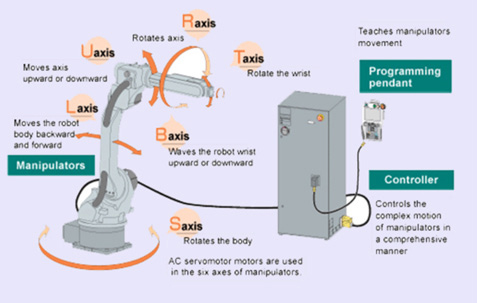
จากรูปที่ 2 ที่แสดงด้านบนนั้นเป็นองค์ประกอบของระบบควบคุมหุ่นยนต์ ซึ่งจะมีอยู่ด้วยกัน 3 ส่วนหลัก และจะเห็นได้ว่าองค์ประกอบทั้ง 3 นั้น จะมีความสัมพันธ์กันในกระบวนการควบคุมซึ่งในแต่ละส่วนนั้นก็มีรายละเอียดที่สลับซับซ้อนอยู่มากทีเดียวและนี่จึงเป็นเหตุผลที่เราต้องทำความรู้จักกับมันให้มากเพื่อที่จะได้สามารถทำงานร่วมกับมันได้
เรามีวิธีรับoutputจากjigเพื่อมาสั่งชุดcontrollerอย่างไรครับช่วยอธิบายหน่อยครับ
ตอบลบ